Descriptif du Robot WiFiBot


Présentation
WiFiBot est un robot télécommandé ou autonome de surveillance
WiFiBoT SC est un robot qui est caractérisé avant tout par une grande flexibilité lui permettant d'être utilisé dans des environnements et des situations multiples. Sa conception mécanique et ses quatre roues motrices permettent à ce robot de se déplacer sur des surfaces irrégulières ou de petits obstacles. Ses petites dimensions et son poids bas facilite le transport et permet explorer des endroits(places) étroits.
Comme un système composé, WiFiBoT SC est ouvert à toute la sorte d'utilisations et d applications. Le robot est convivial et offre différentes possibilités d'expansion à de multiples niveaux. Il dispose dun contrôleur incorporé BECK SC12, un RTOS et un grand choix d'interfaces comme Ethernet incorporé, RS232, I²C et une liaison de WiFi.
WiFiBot peut être commandé, via le WiFI, par un ordinateur. Il peut être aussi indépendant par programmation embarquée. Il possède aussi une caméra motorisée.
Mise en situation

System darchitecture

L'architecture de système est très simple, il est construisent autour d'un bus Ethernet-I²C. Le bus d'Ethernet est alors accessible de l'extérieur à un point daccès Wi-Fi. En général le réseau local incorporé est utilisé pour les périphériques d'une certaine importance (caméra) par IP tandis que le bus I²C est utile pour connecter des modules plus simples basés sur des micro-contrôleurs. Pour finir, le robot dispose de deux ports RS232 qui peuvent être rattachés aux niveaux supérieurs. Cela rend possible d'ajouter différents modules.
| Utilisation |
Descriptif |
|---|
| CPU |
- BECK SC12
- 40 MHz
- RAM 512Kb
- Flash Storage 512 Kb
- RTOS BECK
|
| Interfaces |
- 4x Ethernet 10/100 BaseT
- 1x I²C bus
- 2x RS232 port
|
| WiFi |
- WiFi 802.11b/g
- WLAN AP, Bridge, Client
- 2x Antenna 3dBi
|
| Capteurs |
- 1x Pan-Tilt IP camera
- 2x IR range sensors
- 2x hall encoders (2 independent PID for each robot side)
- 2 x DSPIC30F2010
- Battery level
|
| Moteurs |
- 4x moteurs 7.2V
- 50:1
- 8.87Kg/cm
- 120 rpm
|
| Dimensions |
- Longueur : 28 cm
- Largeur : 30 cm
- Hauteur : 20 cm
- Poids : 4.5Kg
|
| Batteries |
- 9.6V NiMh
- 9500 mAH
- 2h autonomie
- Remplacement facile
|
Interfaces de communications
Le commutateur d'Ethernet

Le port de communication Ethernet 10/100 connecte les différents périphériques de haut niveau du robot formant un réseau local incorporé. Deux ports sont nécessairement pris par le point d'accès et le contrôleur SC12. Un port est généralement utilisé par la caméra IP, mais peut être rendu disponible suivant l'application. Finalement, les deux derniers ports sont libres afin d'ajouter d'autres périphériques si nécessaire, ceux-ci marchant d'une façon complètement transparente.
Bus I2C
Le bus I²C connecte les micro-contrôleurs étant responsables des modules de bas niveau aux processeurs centraux comme un pont avec les niveaux supérieurs de l'architecture de robot. Le SC12 est toujours le maître et toutes les communications passent nécessairement par lui. Jusqu'à 127 dispositifs peuvent être connectés et la fréquence d'horloge maximale du bus est de 30kHz. L'I²C est accessible sur la broche 5 (GND), 6 (SCL) et 9 (SDA) DU DSUB-9
Les ports RS232
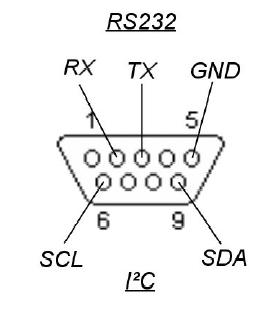
Deux ports RS232 (RX, TX et GND) sont disponibles. Port COM1 sur le connecteur DSUB-9 de gauche, port COM2 sur le connecteur DSUB-9 droit. Les deux ports présentent un signal de PC standard, pour des périphériques utilisant TTL une interface comme le MAX232 est possible.
Capteur incorporés
Contrôle de Vitesse

Les quatre moteurs peuvent être contrôlés dans boucle ouverte ou fermée suivant les besoins de l'utilisateur. Chaque roue a une roue dencodage laser externe de 300 secteurs et le signal est récupéré par un capteur optique. Le signal est alors filtré et envoyé à quatre PID indépendants des contrôleurs. En contrôlant à distance le robot, la boucle fermée est donné est faite par l'opérateur et n'est pas donc très utile, mais est utile pour une utilisation autonome. Le rafraichissement de la commande de chaque roues se fait toutes les 1/25 seconde
Capteurs IR

Le robot est équipé de deux capteurs IR avec une portée maximale autour de 1,30m. Ils marchent par triangulation. La tension correspondant à la distance est alors digitaliée sur 8bits par un micro-contrôleur et envoyée au processeur central. Ces capteurs peuvent avoir des utilisations différentes comme par exemple pour déclencher des arrêts de secours ou pendant des procédures dapproche.
Utilisation

