
Generic solution to control the WIFIBOT with an external PC :
You need to create 2 threads, one for sending commands and the other for receiving.
For that you need to create a TCP/IP socket connecting to the WIFIBOT IP(
192.168.0.230) with port
15000.
So to communicate with the WIFIBOT you need just to receive buf2 and to send buf :
unsigned char buf[2], buf2[7];
There is the details of the communication :
Sending commands :
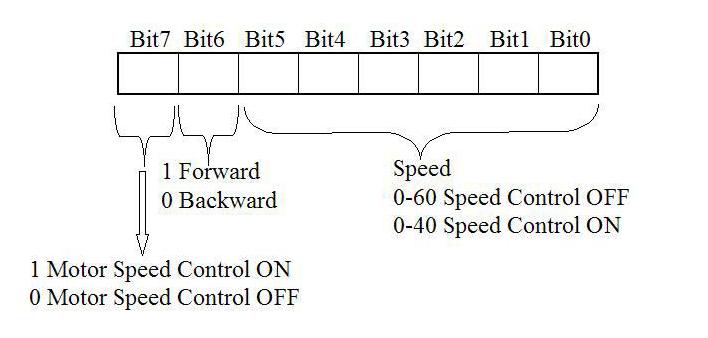
buf[0]=(unsigned char)(comg);//left motor board command
buf[1]=(unsigned char)(comd);//right motor board command
comg and comd is generated depending of the way we want the robot to
move :
Receiving sensors values :
- buf2[0] battery value (0-255)
- buf2[1] front left wheels ticks (0-40 ticks/41ms)
- buf2[2] rear left wheels ticks (0-40 ticks/41ms)
- buf2[3] front right wheels ticks (0-40 ticks/41ms)
- buf2[4] rear right wheels ticks (0-40 ticks/41ms)
- buf2[5] Left infrared sensor (0-150 cm)
- buf2[6] Right infrared sensor (0-150 cm)
Example using C++ and MFC sockets :
Class : MyClass :
Exported from Notepad++
void InitSocket(void);
void Close(void);
Thread_Send();
Thread_Receive();
/*
UINT Thread_Send (LPVOID p)
UINT Thread_Receive (LPVOID p)
*/
CAsyncSocket so;//MFC socket
bool running, running2 ; //to end the Thread
Cstring ip;robot ip
int port;//robot port
unsigned char buf[2], buf2[7]; //send receive buffer
unsigned char comg, comd; //motor board command
void MyClass::InitSocket(void)
{
so.Create();
int status = so.Connect(ip,porttemp);
running=true;
running2=true;
AfxBeginThread(Thread_Receive,this);
AfxBeginThread(Thread_Send,this);
}
void MyClass::Close(void)
{
running2=false;
running=false;
so.Close();
}
void MyClass::Thread_Send(void)
{
while(running)
{
buf[0]=(unsigned char)(comg);//left motor board command
buf[1]=(unsigned char)(comd);//right motor board command
so.Send(&buf, 2, 0);
Sleep(60); //16 Hz
}
}
UINT MyClass::Thread_Send (LPVOID p)
{
MyClass *me = (MyClass *)p;
me-> Thread_Send ();
return 0;
}
void MyClass::Thread_Receive(void)
{
while(running2)
{
int rcvnbr=so.Receive(&buf2,7,0);
if (rcvnbr==7)
{
//Do what you want with the buffer
}
}
}
UINT MyClass::Thread_Receive (LPVOID p)
{
MyClass *me = (MyClass *)p;
me-> Thread_Receive ();
return 0;
}

