2009 : Maquette Exotest

Maquette Exotest
Prise en main
Base du bus CAN
Langage C et JAVA
Mise en situation
Niveau : BTS IRIS première année (23/03/2009)
Durée : 36 H
Equipe : 2 Etudiants
|
Objectif
- C1.6 Présenter la mise en uvre dune solution informatique
- C2.1 Sintégrer dans une équipe de projet
- C4.6 Assembler les éléments matériels assurant la liaison physique dans un système de communication
- C4.7 Installer les différentes couches logicielles dun système de communication sur une station
- C4.8 Coder un module logiciel
- C4.9 Intégrer un module logiciel dans une application
- C5.4 Exploiter un réseau local industriel ou un bus de terrain
- C6.2 Dépanner un système informatique
- C6.6 Dépanner un module logiciel
|
Pré requis
- Programmation en langage Java et C
- Notions sur le bus CAN
|
Travail demandé
- Mettre en uvre un bus spécifique : le bus CAN.
- Décoder et interpréter une trame du bus CAN.
- Implémenter une interface homme machine (IHM)
- Dialoguer à travers lIHM avec la maquette EXXOTEST
|
Matériel
- La maquette EXXOTEST ainsi que le boîtier MUX-Trace
- PC de développement équipé de Visual Studio et NetBeans.
- Documentation relative à la maquette EXXOTEST, au boîtier MUX-Trace. Notes de mise en service.
- Documentation sur le bus CAN.
- Matériel de connectique et alimentation stabilisée.
- Drivers et DLL nécessaires au pilotage de la maquette et du boîtier MUX-Trace.
- Utilitaires permettant linterprétation des trames CAN et une commande logicielle du tableau de bord.
|
Critères dévaluation
- Un rapport par groupe figurant la description du travail fourni. Une première partie décrit le travail du groupe, puis chaque étudiant décrit son propre travail. Le rapport doit être clair et doit servir de guide dutilisateur cest à dire quun utilisateur doit pouvoir à laide de ce rapport facilement utiliser lapplication développée. Les sources du code seront données en annexe.
- Un exposé oral dune durée de 15mn, décomposé en 10mn sans interruption du jury suivi de 5mn de questions. Cet exposé aura comme support le rapport précédemment décrit. Il se déroulera dans la semaine 20/21.
- Une démonstration du développement en cours de TP
- Une partie du travail se fait en groupe, une autre individuellement. Mais le principe est de réaliser la totalité de lapplication. Le travail de groupe est donc prédominant, lentraide entre étudiant est donc souhaité, voir indispensable.
- Un CD de sauvegarde de lensemble du travail (Rapport, code, manuel dutilisation
)
|
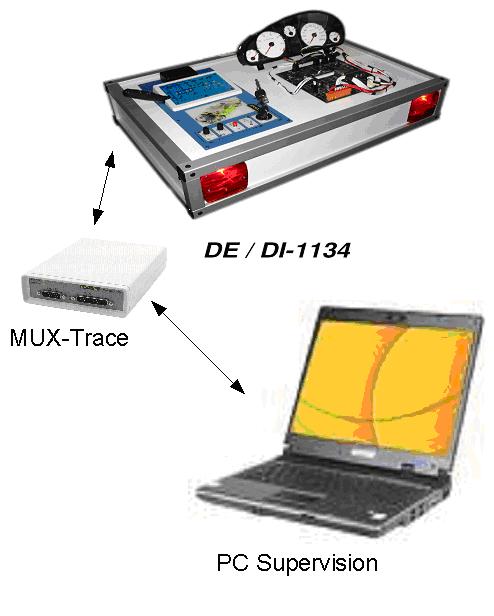
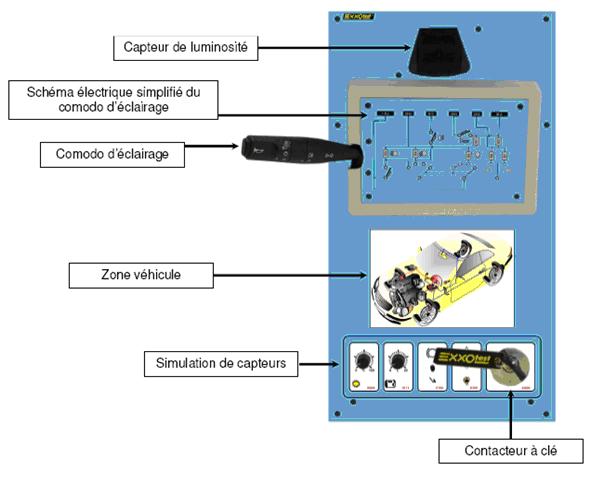
Mise en situation
Il sagit de développer une application permettant le dialogue entre un PC de supervision et une maquette EXXOTEST comprenant un combiné de 407 (tableau de bord) et des capteurs. Les informations sont échangées via des trames CAN à travers un boîtier « MUXTRACE » connecté sur un port USB du PC.
Le but de lapplication est de piloter lallumage automatique des feux de croisement dès que la luminosité ambiante est en dessous dun seuil donné. Lallumage manuel des feux de route et de croisement ainsi que le passage de lun à lautre doit cependant rester actif.
Il est évident que le moteur doit être démarré par action sur la clé de contact pour que la commande automatique soit active.
La variation de la luminosité extérieure est simulée par un capteur se trouvant sur la maquette.
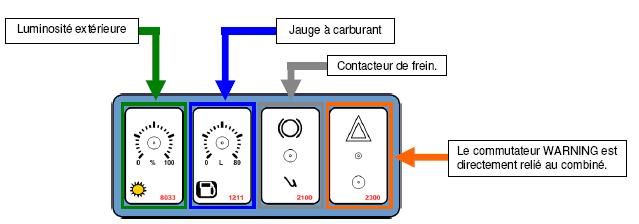
Tableau de bord
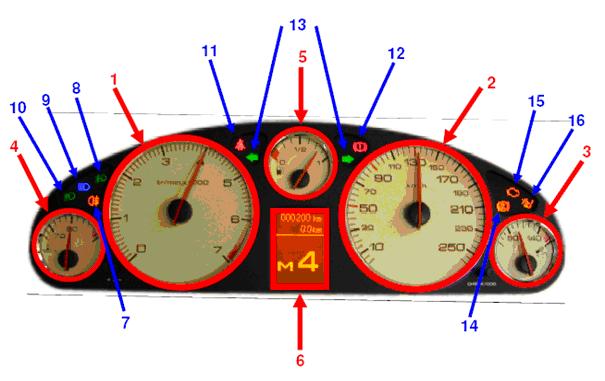
- 1 : Affichage du régime moteur.
- 2 : Affichage de la vitesse véhicule.
- 3 : Affichage de la température dhuile.
- 4 : Affichage de la température deau moteur.
- 5 : Affichage de la jauge de carburant.
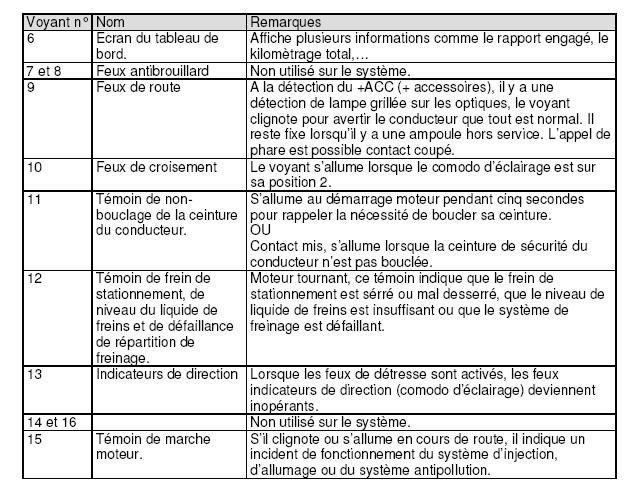
Voyants lumineux
Commande habitacle
Lapplication à développer (langage(s) Java, C laissé à votre appréciation) consiste :
- démarrer le moteur après action sur la clé de contact du tableau de bord, action validée par lallumage du témoin de marche moteur et affichage à lécran du PC de supervision.
- à lire et interpréter la valeur de la luminosité ambiante et, après comparaison à un seuil fixé à lavance par lutilisateur, de commander lallumage automatique des feux de croisement. Cet allumage est validé par lallumage du témoin feux de croisement (10) sur le tableau de bord. Ces données seront visualisées sur lécran du PC de supervision.
2 Travail demandé :
1.Travail de groupe :
- Vérifier la configuration des logiciels de développement.
- Installer le boîtier MUX-Trace et le logiciel de capture de trame.
- Câbler la partie opérative en suivant les instructions fournies sur le CD dinstallation et de documentation. Attention aux couleurs et au type de câble !!! Voir note de mise en service.
- Sapproprier le fonctionnement de la maquette.
- Se documenter sur le bus CAN.
- Définir linterface graphique de lapplication.
2.Etudiant 1 :
En vous aidant de la documentation fournie :
- Câbler la partie opérative (habitacle).
- Interpréter les trames CAN
- Définir linterface graphique de lapplication
- Ecrire le module dacquisition du démarrage du moteur
3.Etudiant 2 :
En vous aidant de la documentation fournie :
- Installer le logiciel de capture de trame
- Installer le boîtier MUX-Trace
- Interpréter les trames CAN
- Ecrire le module de lallumage automatique des feux de croisement

