
Présentation du projet
Sogeti
Sogeti est lun des leaders des services informatiques et dingénierie de proximité, spécialisé dans la gestion des applicatifs et des infrastructures (application and infrastructure management), le conseil en technologies (high-tech engineering) et le testing.
De dimension internationale, le groupe apporte à ses clients des réponses simples, concrètes et efficaces, avec une gamme complète de solutions sur mesure et innovantes.
Sur le territoire national,
Sogeti France accompagne ses clients localement, grâce à une organisation décentralisée, souple et réactive.
Contexte
Pour des raisons de recherches et développements mais aussi pour garder un lien étroit avec MicroSoft, une étude sera réalisée dans un secteur reliant électronique et informatique.
Les cartes retenues sont des cartes contrôleur Fez Domino distribuées par
GHI Electronics . Lintérêt de ces cartes est leurs flexibilités et la facilité de rajouter des composants sans passer par du câblage.
Lautre intérêt est de pouvoir développer en C# grâce au
SDK Micro Frame-Work de MicroSoft.
Objectif
Lobjectif du projet est de réaliser un robot assez petit pour pouvoir se déplacer dans des conduites daération pour détecter déventuelles sources de chaleur ou un début dincendie par détection de fumée.
Il doit pouvoir être télécommandé par liaison radio 2.4GHz, mais aussi se déplacer en autonomie si lenvironnement obstrue la liaison.
Description du robot avec photos
- Environnement de travail
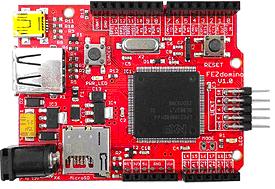
- La fez Domino
Conçu sur la base dun puissant processeur ARM7 cadencé à 72 MHz, le "FEZ DOMINO" est probablement le système de développement embarqué (capable dêtre programmé sous environnement Microsoft .NET Micro Fra-mework) parmi le plus petit et le plus économique du marché.
Lintérêt est la possibilité dextension juste par clipage.
- Robot
La plateforme DFRobot 4WD est un kit incluant 4 moteurs, 4 roues et un châssis complet en aluminium haute résistance ainsi que les accessoires pour lassembler.

- Carte dextension. Elle permet de contrôler les moteurs.

- Différents capteurs seront utilisés :
- Capteur de feu
- Capteur de température
- Capteur IR
Il sera possible den rajouter suivant les besoins.
- La transmission radio se fera avec une Xbee radio

- La télécommande est une carte TAHOE II Rev1.1 avec écran tactile.

- Démarrer (tutoriaux) et acheter
Expressions des besoins

Moyens préliminaires disponibles et contraintes de réalisation
Spécifications
Diagramme détats décrivant le comportement nominal

Synoptique de l'architecture matérielle (diagramme de déploiement)

Répartition du travail
Fonctions à développer et tâches à effectuer
| Etudiant 1 :M ............................ |
Soccupe des tâches suivantes
- Analyse du matériel
- Compréhension de lassemblage des différentes cartes.
- Installation des cartes/capteurs sur le robot.
- Réalisation de lalgorithme de lavancement automatique du robot suivant les différents cas rencontrés.
- Création de classes permettant de réaliser lalgorithme
- Intégration des classes venant de la télécommande.
|
| Etudiant 2 :M ............................ |
Soccupe des tâches suivantes
- Analyse du matériel
- Compréhension de lassemblage des différentes cartes.
- Installation des cartes/capteurs sur le robot.
- Utilisation de la télécommande par lécran tactile.
- Transmission par radio (Emetteur/récepteur)
- Création et adaptation des classes permettant la commande du robot.
|

