2012 : Suivi de lignes

Robot Légo suiveur de lignes
Prise en main matériel
Programmation C#/LabView
Communication Bluetooth
Analyse de trames
Mise en situation
Niveau : BTS IRIS première année (12/03/2012)
Durée : 34 H
Equipe : 3 Etudiants
|
Objectif
- C1.6 Présenter la mise en uvre dune solution informatique
- C2.1 Sintégrer dans une équipe de projet
- C4.6 Assembler les éléments matériels assurant la liaison physique dans un système de communication
- C4.7 Installer les différentes couches logicielles dun système de communication sur une station
- C4.8 Coder un module logiciel
- C4.9 Intégrer un module logiciel dans une application
- C5.4 Exploiter un réseau local industriel ou un bus de terrain
- C5.5 Installer des services techniques internet
- C6.2 Dépanner un système informatique
- C6.6 Dépanner un module logiciel
|
Pré requis
- Programmation C#
- Initiation réseau
|
Travail demandé
- Construction du robot
- Analyse des programmes existants
- Créer une interface avec labView
- Créer une interface C#
- Créer un composant de commande du robot
- Communication Bluetooth
|
Matériel
- Un robot Légo Mindstorms
- Un PC de développement
- Un logiciel de développement dérivé de LabView
- Un exemple de communication avec le robot en C++
- Lien de logiciels/Exmeples sur le net
|
Critères dévaluation
- Un rapport par groupe figurant la description du travail fourni. Une première partie décrit le travail du groupe, puis chaque étudiant décrit son propre travail. Le rapport doit être clair et doit servir de guide dutilisateur cest à dire quun utilisateur doit pouvoir à laide de ce rapport facilement utiliser lapplication développée. Les sources du code seront données en annexe.
- Un exposé oral dune durée de 15mn, décomposé en 10mn sans interruption du jury suivi de 5mn de questions. Cet exposé aura comme support le rapport précédemment décrit. Il se déroulera dans la semaine 20/21.
- Une démonstration du développement en cours de TP
- Une partie du travail se fait en groupe, une autre individuellement. Mais le principe est de réaliser la totalité de lapplication. Le travail de groupe est donc prédominant, lentraide entre étudiant est donc souhaité, voir indispensable.
- Un CD de sauvegarde de lensemble du travail (Rapport, code, manuel dutilisation
)
|
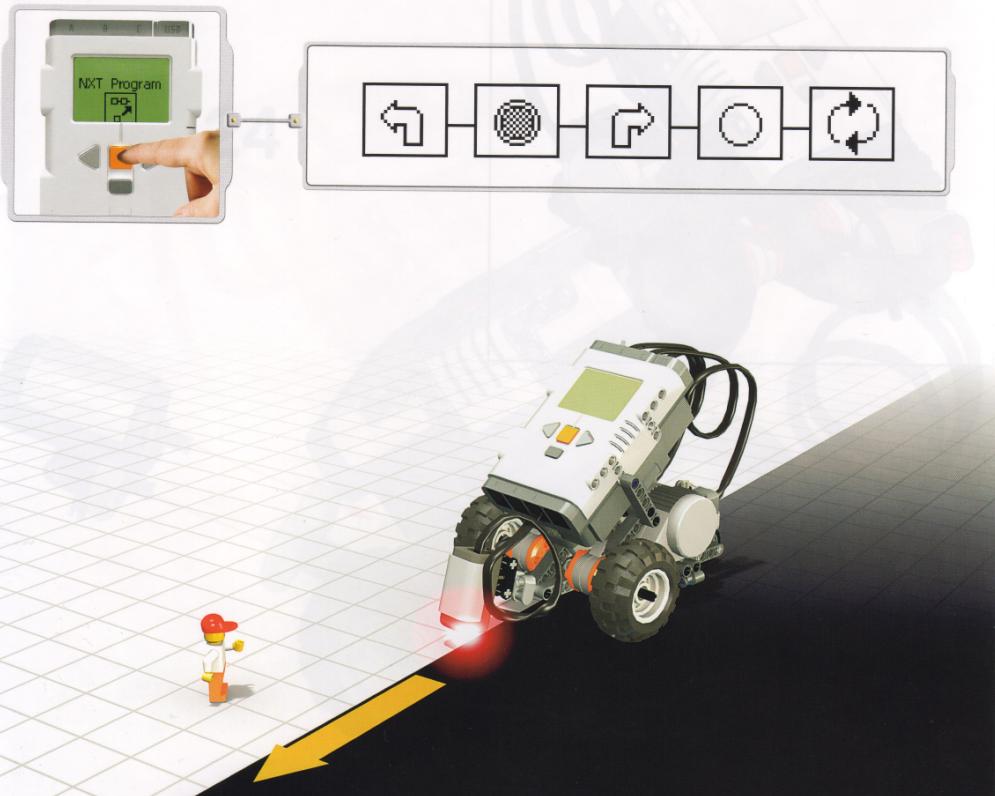
Mise en situation
Le robot
Lego Mindstorm est un robot polyvalent. Nous allons lutiliser comme un transporteur auto-dirigé, connaissant son trajet en suivant une ligne sur le sol. Il peut avancer, reculer, tourner. Il possède différents capteurs dont un capteur InfraRouge pour lui faire éviter les obstacles.
Par défaut, il existe un logiciel sur PC qui permet de créer un programme pour le NTX. Toute la communication se fait en Bluetooth. Mais il est possible de créer un programme indépendant embarqué qui lui ferait faire un trajet prédéterminé.
Le but de ce mini-projet est de créer un programme en C# téléchargeable qui permette au robot dêtre indépendant et de pouvoir superviser sur un PC le robot (marche/arrêt) par une communication Bluetooth.
2 Travail demandé :
1. Travail de groupe :
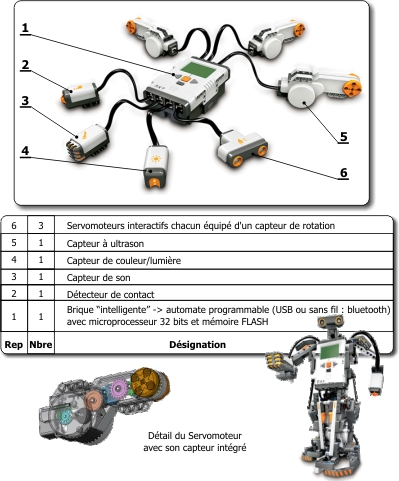
- Construire le robot.
- Faire la liste des capteurs et définir leur technologie.
- Installer un premier logiciel de développement (dérivé de Labview) :
Logiciel
- Créer un logiciel embarqué permettant au robot de suivre une ligne.
Exemple de programme :
Exemple
- Aller voir les pages suivantes :
- Tester le programme réalisé.
2. Répartition du travail
a. Etudiant 1 : Commande/Supervision
- Faire lIHM générale de lapplication en C#
- Trouver la trame à envoyer pour excécuter un Marche/Arrêt sur les moteur des roues
- Envoyer les trames en utilisant la communication Bluetooth de létudiant 2.
b. Etudiant 2 : Communication Bluetooth
- En vous aidant de lexemple donné en C++, créer une classe C# permettant de communiquer avec le robot en Bluetooth.
- Créer les autres classes permettant la communication avec les différents capteurs/actionneurs du robot
c. Etudiant 3 : Programmation embarquée en C#
- Créer les classes (C#) spécifiques à chaque composant en vous aidant du SDK pour Windows
Développement Légo en C#
- Créer le programme en C# permettant au robot de suivre la ligne au sol

