2013 : Aspirateurs avec cartes Fez Domino

Robot aspirateur

Prise en main matériel
Connectique
Programmation C#
Algorithme
Mise en situation
Niveau : BTS IRIS première année (04/03/2013)
Durée : 44 H
Equipe : 2X2 Etudiants
|
Objectifs
- C1.6 Présenter la mise en uvre dune solution informatique
- C2.1 Sintégrer dans une équipe de projet
- C4.6 Assembler les éléments matériels assurant la liaison physique dans un système de communication
- C4.7 Installer les différentes couches logicielles dun système de communication sur une station
- C4.8 Coder un module logiciel
- C4.9 Intégrer un module logiciel dans une application
- C5.4 Exploiter un réseau local industriel ou un bus de terrain
- C5.5 Installer des services techniques internet
- C6.2 Dépanner un système informatique
- C6.6 Dépanner un module logiciel
|
Pré requis
- Programmation C#
- Bases délectronique
|
Travail demandé
- Lire la documentation fournie
- Analyse des documents de configuration
- Connecter carte/moteurs/capteurs
- Créer les classes
- Créer lalgorithme
|
Matériel
- Voir présentation plus loin
|
Critères dévaluation
- Un rapport par groupe figurant la description du travail fourni. Une première partie décrit le travail du groupe, puis chaque étudiant décrit son propre travail. Le rapport doit être clair et doit servir de guide dutilisateur cest à dire quun utilisateur doit pouvoir à laide de ce rapport facilement utiliser lapplication développée. Les sources du code seront données en annexe.
- Un exposé oral dune durée de 15mn, décomposé en 10mn sans interruption du jury suivi de 5mn de questions. Cet exposé aura comme support le rapport précédemment décrit. Il se déroulera dans la semaine 20/21.
- Une démonstration du développement en cours de TP
- Une partie du travail se fait en groupe, une autre individuellement. Mais le principe est de réaliser la totalité de lapplication. Le travail de groupe est donc prédominant, lentraide entre étudiant est donc souhaité, voir indispensable.
- Un CD de sauvegarde de lensemble du travail (Rapport, code, manuel dutilisation
)
|
Mise en situation
Lobjectif du projet est de réaliser un robot qui serait un aspirateur autonome. Seul laspiration réelle ne sera pas matérialisée, le cheminement du robot devra être fait.
Vidéo Aspirateur
Lautre intérêt est de pouvoir développer en C# grâce au
SDK Micro Frame-Work de MicroSoft.
Description du robot avec photos
- Environnement de travail
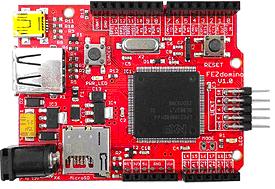
- La fez Domino
Conçu sur la base dun puissant processeur ARM7 cadencé à 72 MHz, le "FEZ DOMINO" est probablement le système de développement embarqué (capable dêtre programmé sous environnement Microsoft .NET Micro Fra-mework) parmi le plus petit et le plus économique du marché.
Lintérêt est la possibilité dextension juste par clipage.
- Robot
La plateforme DFRobot 4WD est un kit incluant 4 moteurs, 4 roues et un châssis complet en aluminium haute résistance ainsi que les accessoires pour lassembler.

- Carte dextension. Elle permet de contrôler les moteurs.

- Différents capteurs seront utilisés :
- Capteur dinclinaison
- Capteur IR
Il sera possible den rajouter suivant les besoins.
- La transmission radio se fera avec une Xbee radio

- Démarrer (tutoriaux) et acheter
Remarques :
Sur le partage, dans le répertoire mini-projet/Robots Fez vous trouverez :
- Micro FrameWork et SDK GHI
- Aspirateur qui est la commande du matériel
- FEZ 2010 qui est un projet dexemple de commande des moteurs/led et IR.
2 . Travail demandé
Il existe deux robots. Pour la prise en main, les quatre étudiants travailleront ensemble. Puis, les étudiants se sépareront en deux groupes, un robot chacun.
Groupe :
- Connecter lensemble des robots
- Faire un schéma du câblage
- Faire une analyse UML diagramme de classes)
- Créer son environnement de travail.
- Faire clignoter une led en prenant lexemple donné.
- Faire marcher une roue simplement. En prenant lexemple donné.
- Récupérer linformation dun capteur de présence.
Etudiant 1/3 : Commande moteur
- Réaliser une classe qui commande les moteurs (marche, tourner, avancer
)
Etudiant 2/4 : Partie commande des capteurs et du bouton poussoir
- Réaliser une classe qui récupere les différentes informations des différents capteurs
En groupe : Programme autonome du déplacement des robots
- Faire lalgorithme du programme autonome.
- Utiliser le multi-tâches.
- Assembler les différents sous-ensemble.
- Tester le déplacement autonome.

