TP5 : Initiation algorithme Formula


Mise en situation
Le travail de ce TP se déroule en binôme.
Temps alloué : 4h
Logiciel utilisé : Flowcode V5
|
Référentiel
| A2 Analyse système : Analyser et interpréter une information numérique
|
Nous allons apprendre à commander un robot suiveur de ligne en nous appuyant sur le robot Formula de Matrix :
- Lancer FlowCode V5
- Créer un nouveau projet
- Dans Divers, choisir « Formula FlowCode Buggy »
- Dans le menu « Boîte outils composants », dans licône « Divers », choisir « Formula »
Pour la prise en main, nous allons utiliser le bandeau de led en simulation.
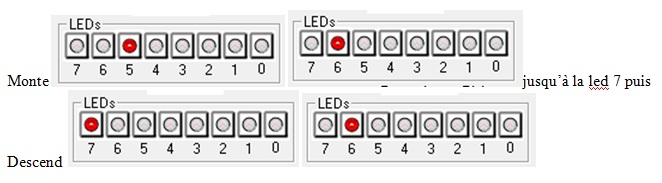
Q1 Faire lalgorithme flowCode qui permet de faire un chenillard en aller/retour dans une boucle infinie.
Remarque : un chenillard est une seule led allumée lune après lautre.
Aidez vous du document technique "description_formula_V2" donné p7
 Appeler le professeur
Appeler le professeur
On va exécuter le programme sur le robot réel.
- Brancher le robot sur un port USB du PC (derrière, à lextérieur au niveau prise RJ45
- Brancher lalimentation
- Aller à :

- La compilation se fait
- Quand « Buggy no found » apparaît, appuyer sur le bouton SW3-RE3 Reset du robot près de la fiche USB.
- Attendre un peu.
- Pour démarrer votre programme, appuyer sur le bouton SW4
Q2 Appeler le professeur pour constater le bon déroulement du chenillard sur le matériel.
Q3Dans un autre projet, faire un programme identique comptant en binaire sur les leds de 0 à 255 toutes les 500ms
Appeler le professeur pour valider
Nous allons utiliser les commandes moteurs. Pour cela, créer un nouveau projet. Aidez-vous de la documentation technique pour trouver les macro nécessaires.
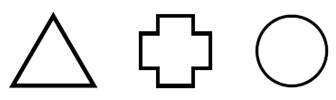
Rem : faire des Delay plus ou moins grand pour appréhender la progression. Faîtes des figures de 20cm de côté environ.
Q4 Réaliser les trois figures suivantes :
 Appeler le professeur pour valider
Appeler le professeur pour valider
Nous allons maintenant démarrer ou arrêter avec les interrupteurs.
Q5 Faire lalgorithme qui lit linterrupteur droit pour démarrer et lit linterrupteur gauche pour arrêter (rouler tout droit par exemple)
Détection de son :
Faire avancer le robot quand il « entendra » un son assez fort. Arrêter le au bout de 2s. Il repartira en arrière pendant 2s quand il « réentendra » un son assez fort. Puis sarrêtera.
Q6 Décrire le fonctionnement du capteur. Réaliser lalgorithme.
Appeler le professeur pour valider.
Capteur de luminosité :
Dans le même principe, faire avancer vite sil y a beaucoup de lumière, ralentir si la luminosité baisse pour sarrêter sil fait noir.
Q7 Décrire le principe du capteur de lumière. Faire lalgorithme, tester avec le robot.
Appeler le professeur pour valider
Suivi de ligne :
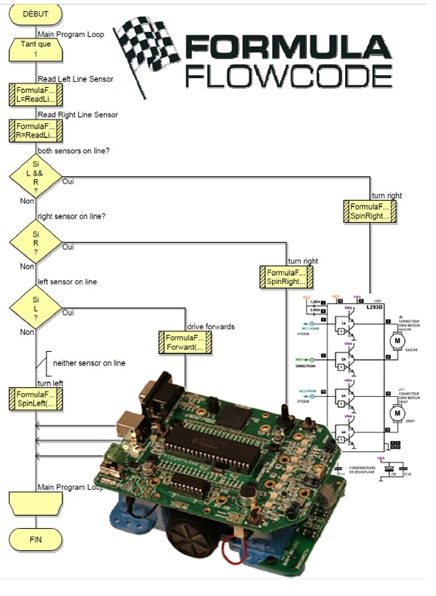
Q8 En vous aidant de la documentation Formula et dinternet, expliquer comment fonctionnent les capteurs. En utilisant les deux capteurs IR, faire lalgorithme permettant au robot Formula de suivre un circuit matérialisé par une ligne noire. Il existe différent circuit à tester.
Appeler le professeur pour valider.
Pour les plus rapides :
- Faire suivre un mur par le robot
- Utiliser la détection obstacle pour sarrêter
- Faire sortir le robot dun labyrinthe.

