2018 : Projet RobETT

Mise en situation
Le travail de ce TP se déroule en groupe de cinq.
1er STI2D1 : 6 équipes
1er STI2D2 : 5 équipes
1er STI2D3 : 6 équipes
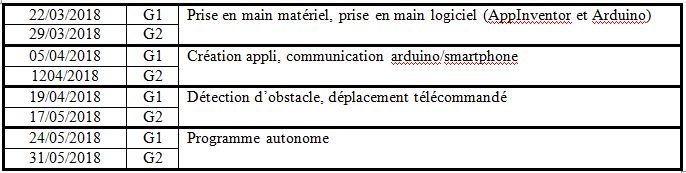
Début 22/03/2018, 3h par semaine soit 24h
|
Référentiel
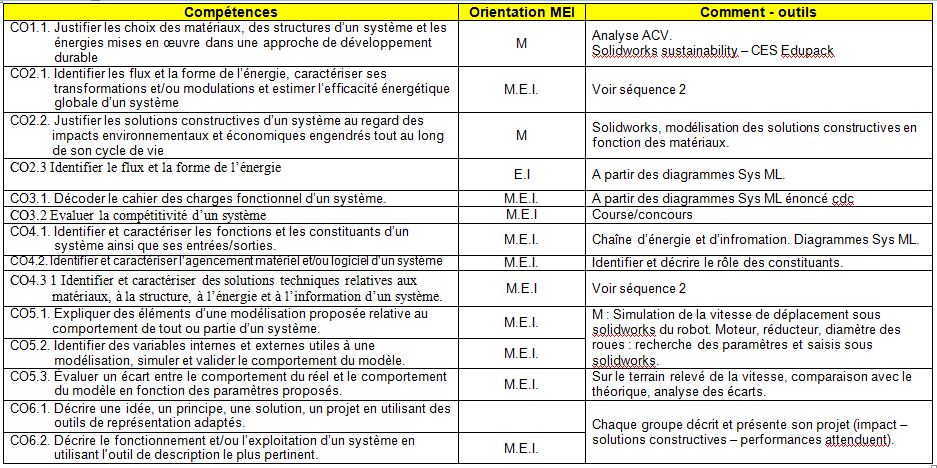
|
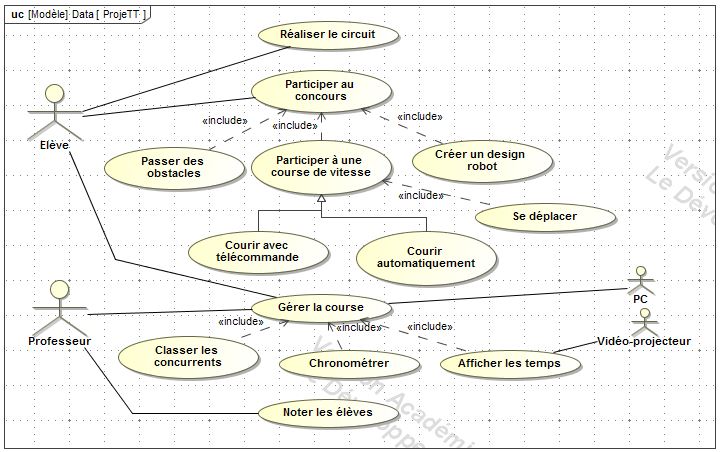
A partir dun robot existant, chaque équipe devra améliorer son prototype tant au niveau mécanique quélectronique pour participer à une course chronométrée. Chaque équipe devra aussi concevoir une infrastructure permettant différentes épreuves : course télécommandée, course autonome, passage dobstacles (pente raide
).
Une partie de gestion de la course (chronométrage, classement, visualisation des temps pour le public) devra être aussi réalisée.
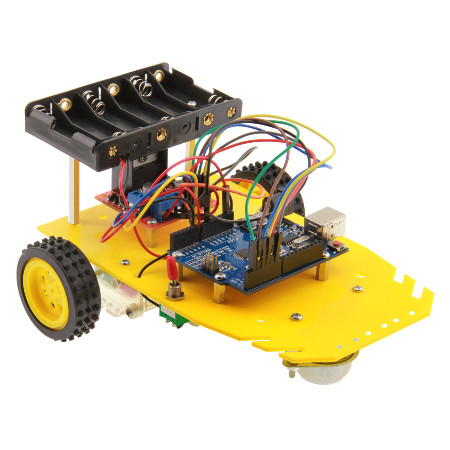
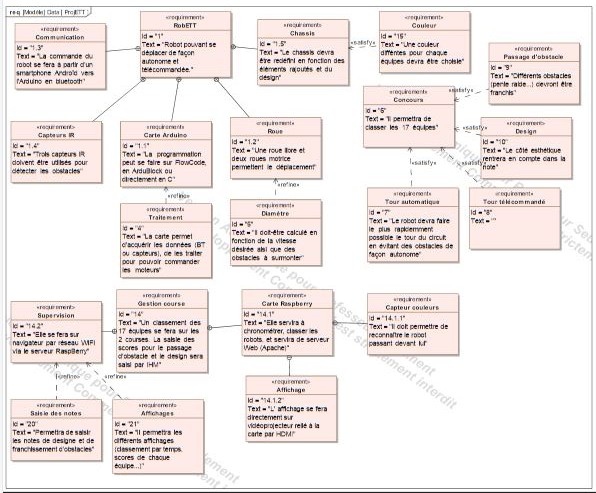
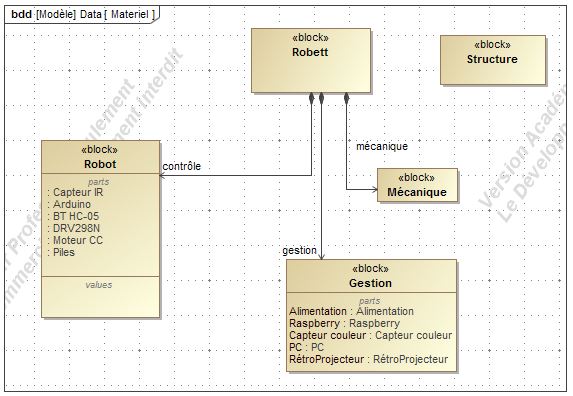
Le matériel mis à disposition est le même pour toutes les équipes. Il se compose :
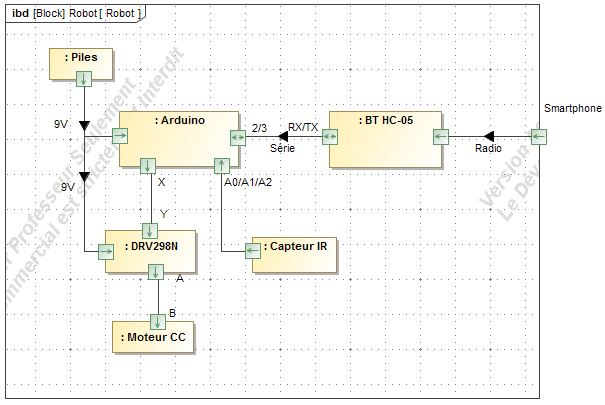
- Un robot :

- Trois capteurs infrarouge détecteurs dobstacle
- Un module bluetooth HC-05
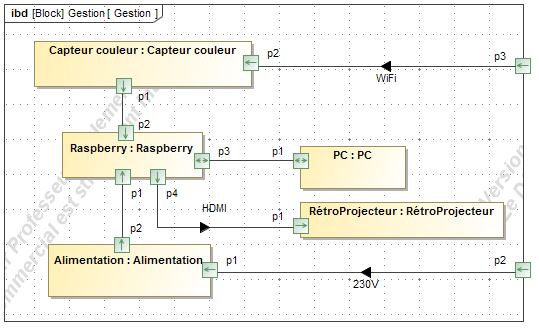
A cela se rajoute le matériel pour la gestion :
- Carte Raspberry PI 3
- Dongle WiFi
- Capteur couleur pour reconnaître le passage des voitures.
Pour le reste des différents matériels, le choix est laissé libre aux équipes (dimension roues, structure, réducteur
).
Chaque membre des équipes devra participer à tous les différents « type de métiers » (mécanique, architecture, énergie, informatique, électronique). Le travail devra être réparti librement et équitablement au sein de léquipe.
Les groupes des classes actuels devront être remaniés pour que les membres de léquipe se retrouvent ensemble chaque semaine pendant les trois heures de TP, une fois en obédience mécanique, une fois en obédience électrique.
STI2D2 (Energie et Information)
STI2D2 (Matière)
Semaine 23 : Concours

