2018 : Ramasseur de balles de ping-pong

1er résultat pour les OSI 2018
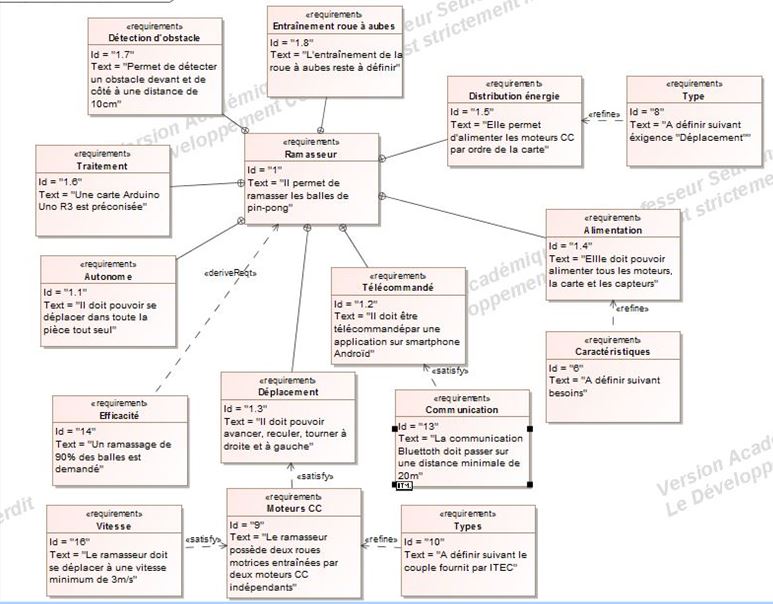
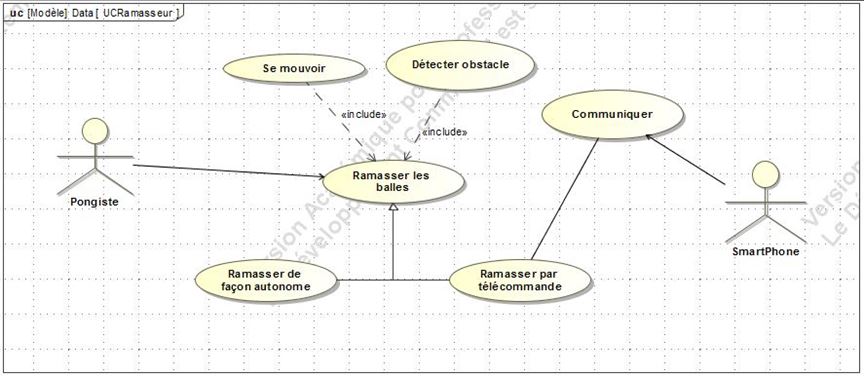
Problématique :
Comment aider un pongiste à mobilité réduite à ramasser les balles de ping-pong lors des entraînements?
- 3 élèves de SIN
- 4 élèves d ITEC

Analyse
Répartition des tâches :
- Elève 1 :
- Choisir les moteurs pour se déplacer
- Distribuer l'énergie pour avancer et reculer
- Simuler le fonctionnement du moteur
- Programmer la commande moteur sur une Arduino
- Participer à l'élaboration de l'algorithme général
- Elève 2 :
- Choisir capteur de détection dobstacles
- Trouver une solution pour entraîner la roue à aubes
- Simuler le fonctionnement des capteurs
- Programmer la détection dobstacles sur une carte Arduino
- Participer à l'élaboration de l'algorithme général
- Elève 3 :
- Choisir les composants pour la communication Bluetooth sur Arduino
- Effectuer la communication Bluetooth entre un smartphone et la carte Arduino
- Commander lavance, le recul, les virages du robot
- Programmer l'envoi et la reception de la trame du smartphone à la carte Arduino
- Participer à l'élaboration de l'algorithme général

