TP5 : Socket avec AlphaBot

Mise en situation
Le travail de ce TP se déroule seul.
Temps alloué : 7h
La programmation se fait directement sur la carte Raspberry avec geany et sur Visual Studio en C#(gcc)
|
Objectif
- Prise en main de l'alphabot
- Programmation sockets
|
Pré requis
Programmation C (1er année)
Aide C : Référence
Visual Studio C#
|
Travail demandé
Un listing du code source commenté
Démonstration au professeur de la progression.
Une vidéo commentée de la démonstration
|
Critères dévaluation
| Clarté de l algorithme, lisibilité du code, exécutable opérationnel.
|
Nous allons utiliser l'AlphaBot pour en créer un robot de surveillance:

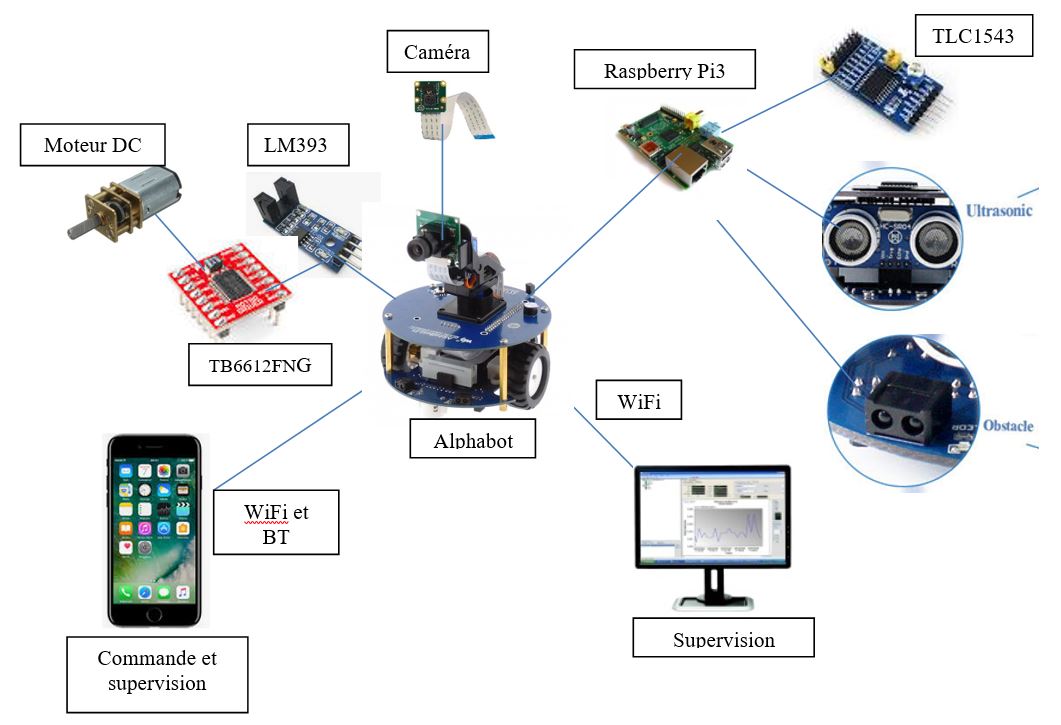
La documentation se trouve ici :
Documentation technique.
L'alphaBot doit respecter le diagramme d'exigence et le diagramme d'utilisation
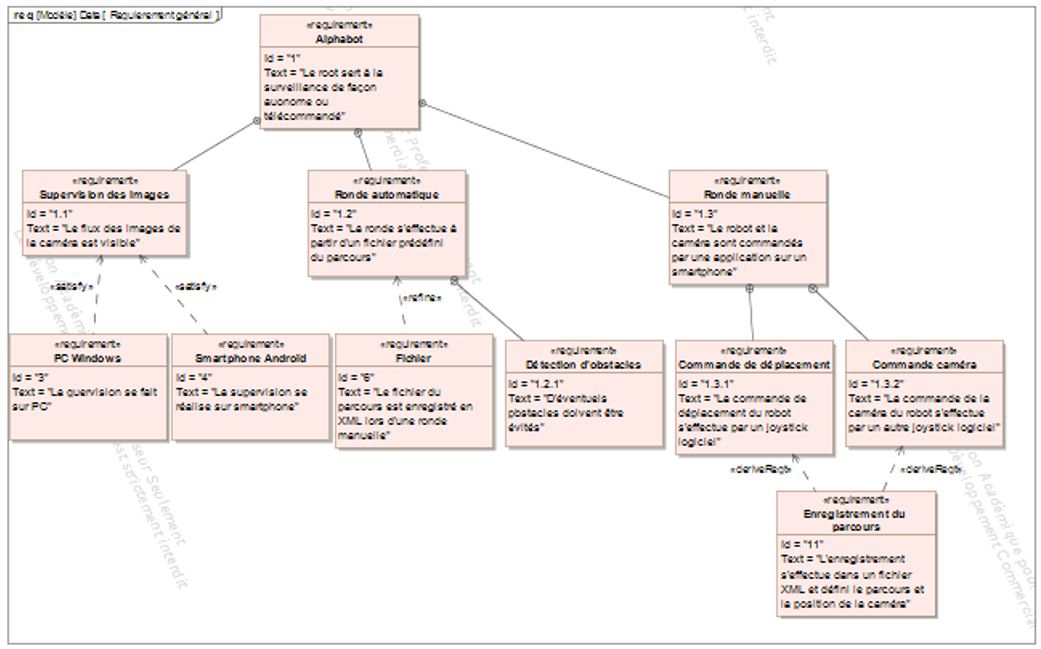
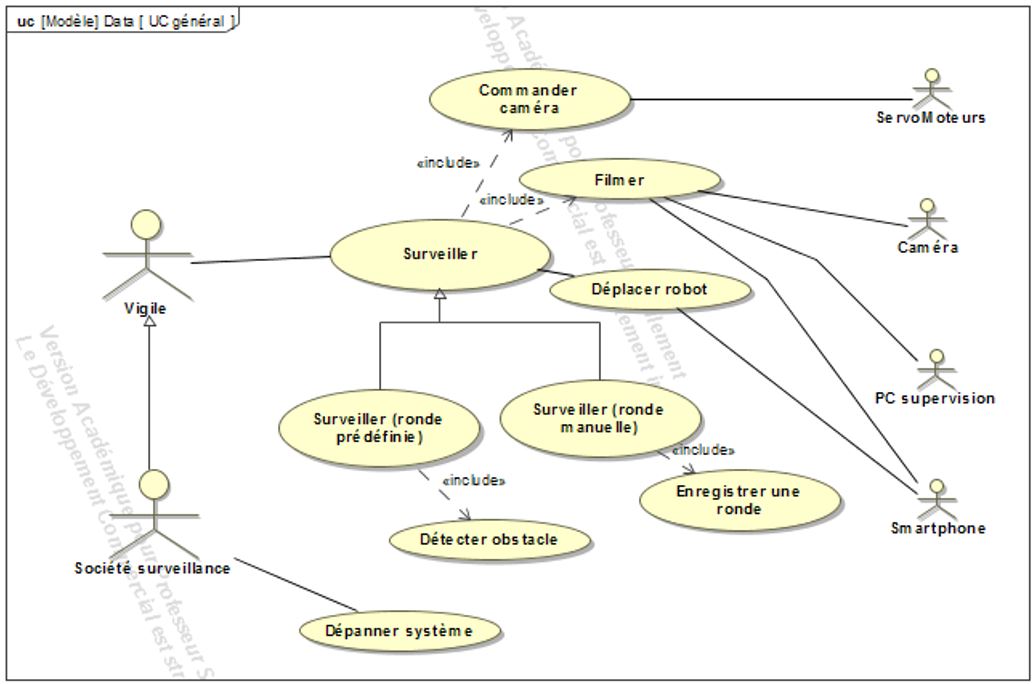
- Un mode manuel permet de diriger le robot soit à partir d'une application sur Windows, soit à partir d'un smartphone. La communication se fait en WiFi par des sockets. Le flux vidéo est visible sur les deux applications. La caméra est elle aussi dirigeable sur 2 axes à partir des applications.
- Soit automatiquement grâce à des parcours préenregistrés. D'éventuels obstacles peuvent être évités grâce au capteur d'obstacle.
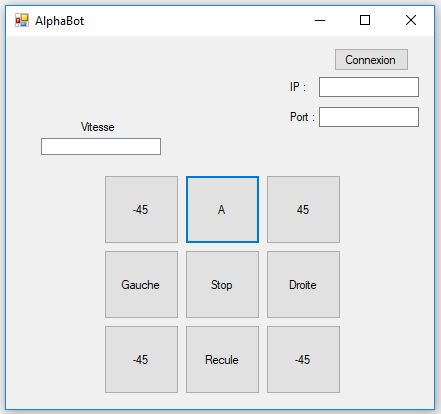
Pour ce TP, nous ne nous occuperons que de la direction du robot à partir d'une application Windows en C#, la communication se faisant par des sockets.
- Faire l'IHM sur votre application en Visual Studio (succincte au début)
- Créer une classe Communication :
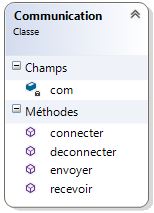
En vous aidant de
Documentation ou de
Documentation
- Le bouton connecter permet de se connecter au serveur de la Raspberry en mettant l'adresse IP et le port dans les textBox de dessous.
- Faire le serveur sur la Raspberry en mettant des traces (printf) et en gérant les erreurs.
Documentation
- Faire le test en envoyant une trame dans un des boutons du pavé.

