TP6 : Robot surveillance

Mise en situation
Le travail de ce TP se déroule à 2.
Temps alloué : 7h
Prise en main et dépannage d'un robot de surveillance
|
Objectif
- Prise en main de l'alphabot
- Dépannage composants
|
Pré requis
Programmation C (1er année)
Notion de Python
Rapsberry Pi
|
Travail demandé
A chaque test réalisé, faire une démonstration au professeur
Démonstration au professeur de la progression.
|
Critères dévaluation
| Exécutable opérationnel.
|
Nous allons utiliser 2 l'AlphaBot pour en créer un robot de surveillance: un avec une carte Raspberry Pi3 et un avec une carte Raspberry zéro

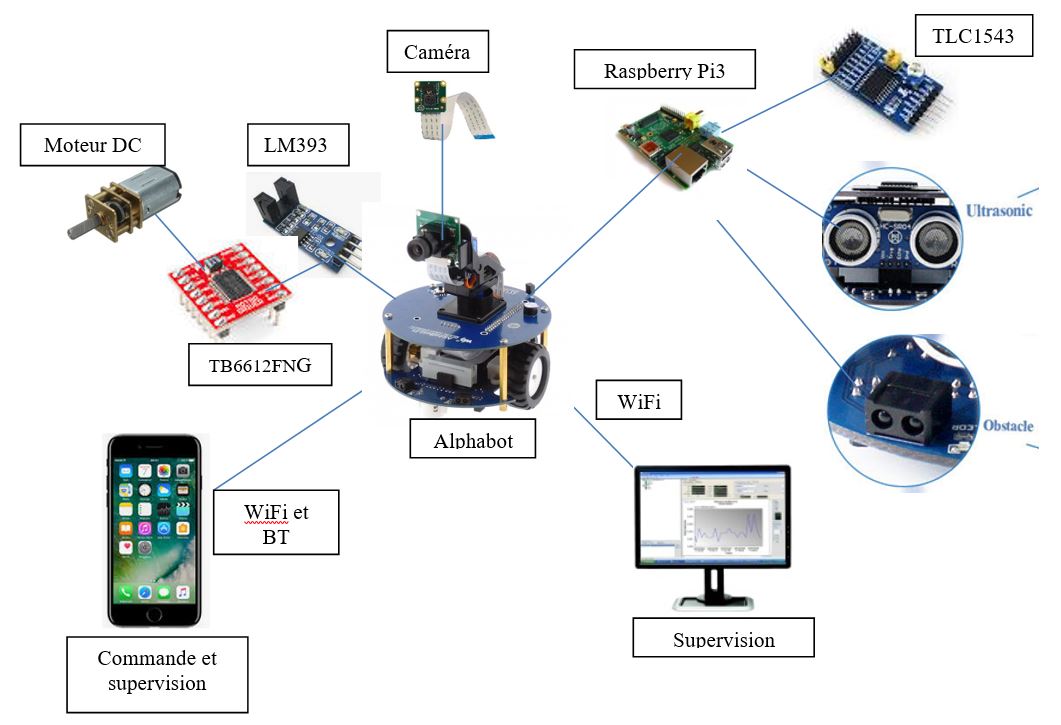
La société Préventalarme est spécialisée dans la surveillance de sites sensibles au moyen de robots autonomes.
Le robot peut être commandé à distance à partir d'un PC (WiFi) ou par téléphone (BT ou WiFi) mais aussi de façon autonome à partir d'un chemin préenregistré. Différents capteurs servent pour détecter différents obstacles.
Différentes pannes sont possibles
- Perte de l'adresse IP et du port de connexion
- Connexion WiFi indisponible
- Perte de la carte SD
- Distance non valide
- Le robot n'avance plus
- Accu vides
- Flux vidéo HS
En vous aidant du guide et des codes donnés en exemples, vérifiez le bon fonctionnement des éléments suivants :
- Mettre en place le WiFi Configuration
- Test des moteurs
- Utilisation du joystick
- Contrôle de la télécommande
- Eviter obstacles par IR
- Contrôle servo-moteur caméra
- Test de la caméra
- Contrôle à distance du robot avec flux vidéo.

