2019 : Robot de surveillance Alphabot PI

Robot Surveillance AlphaBot

Prise en main matériel
Programmation C++
Algorithme
Mise en situation
Niveau : BTS SN première année (25/02/2019)
Durée : 30 H
Equipe : 2 étudiants par robot
|
Objectifs
- C1.1Rechercher et structurer des informations techniques
- C1.2Présenter des informations
- C2.1Maintenir les informations
- C3.1Analyse d'un cahier des charges
- C4.2Adapter et/ou configurer un matériel
- C4.4Développer un module logiciel
- C4.5Tester et valider un module logiciel
- C4.6Intégrer un module logiciel
|
Pré requis
- Programmation C
- Bases délectronique
|
Travail demandé
- Lire la documentation fournie
- Analyse des documents de configuration
- Créer lalgorithme
- Faire le programme
|
Matériel
- Voir présentation plus loin
|
Critères dévaluation
- Un rapport par groupe figurant la description du travail fourni. Une première partie décrit le travail du groupe, puis chaque étudiant décrit son propre travail. Le rapport doit être clair et doit servir de guide dutilisateur cest à dire quun utilisateur doit pouvoir à laide de ce rapport facilement utiliser lapplication développée. Les sources du code seront données en annexe.
- Un exposé oral dune durée de 15mn, décomposé en 10mn sans interruption du jury suivi de 5mn de questions. Cet exposé aura comme support le rapport précédemment décrit. Il se déroulera dans la semaine 20/21.
- Une démonstration du développement en cours de TP
- Une partie du travail se fait en groupe, une autre individuellement. Mais le principe est de réaliser la totalité de lapplication. Le travail de groupe est donc prédominant, lentraide entre étudiant est donc souhaité, voir indispensable.
- Une vidéo, mise en ligne sur Youtube, de votre démonstration finale.
- Un CD ou un zip de sauvegarde de lensemble du travail (Rapport, code, manuel dutilisation
)
|
Nous allons utiliser 2 AlphaBot pour en créer un robot de surveillance: un avec une carte Raspberry Pi3 et un avec une carte Raspberry zéro
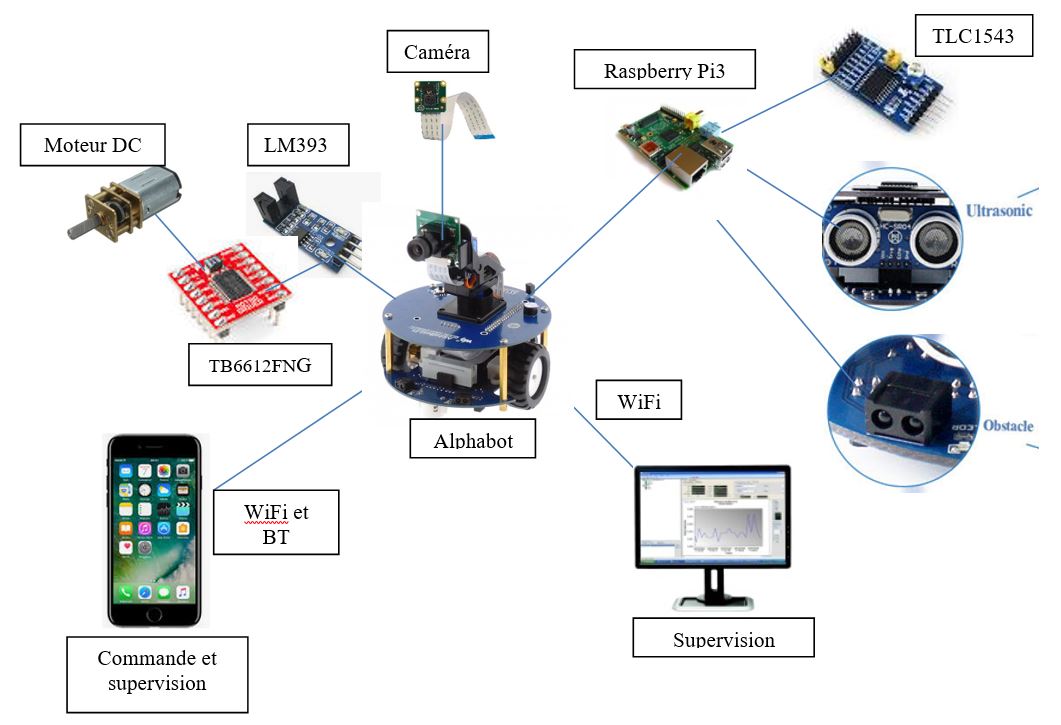
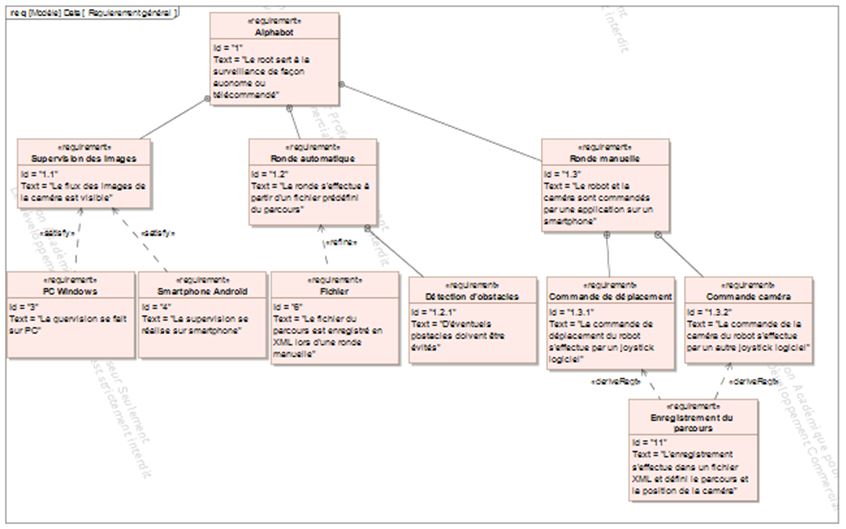
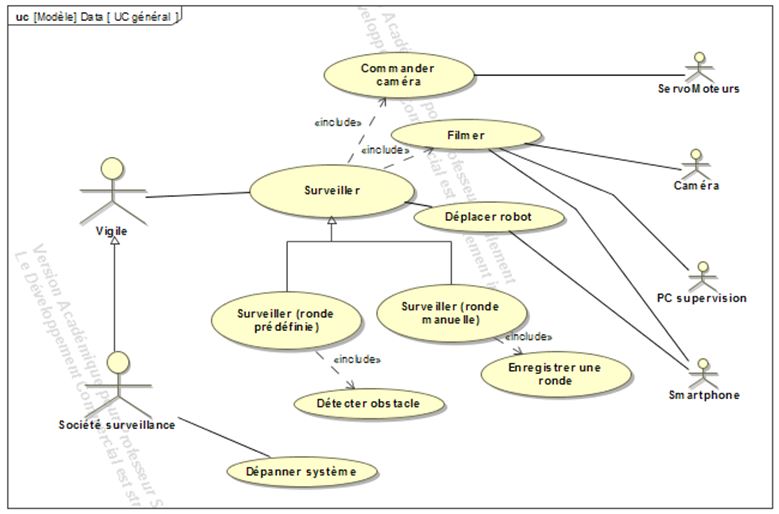
La société Préventalarme est spécialisée dans la surveillance de sites sensibles au moyen de robots autonomes.
Le robot peut être commandé à distance à partir d'un PC (WiFi) ou par téléphone (BT ou WiFi) mais aussi de façon autonome à partir d'un chemin préenregistré. Différents capteurs servent pour détecter différents obstacles. Un parcours pourra être enregistré pour que le robot soit autonome lors de sa ronde
En vous aidant du
guide et des codes donnés en exemples, prendre en main l'alphabot et vérifier le bon fonctionnement des éléments suivants :
- Mettre en place le WiFi Configuration
- Test des moteurs
- Contrôle de la télécommande
- Contrôle servo-moteur caméra
- Test de la caméra. Utiliser sudo python3 camStrea.py en enlevant le proxy du lycée.
Une fois les éléments testés en Python, faire le programme en C.
Vous vous aiderez des objets donnés (Moteur...) ainsi que de l'exemple de communication par socket donné aussi.

