2015 : MyRioRobot surveillance

Robot Surveillance
Prise en main matériel
Connectique
Programmation C++
Algorithme
Mise en situation
Niveau : BTS IRIS première année (16/02/2015)
Durée : 20 H
Equipe : 2X2 Etudiants
|
Objectifs
- C1.5Analyser l'expression d'un besoin client
- C2.5Travailler en équipe
- C3.4Valider un choix d'une architecture matérielle/logicielle
- C3.6Recenser les solutions existantes répondants au cahier des charges
- C3.7Contribuer à la modélisation de tout ou partie d'un produit
- C4.1Câbler et/ou intégrer un matériel
- C5.4Installer une bibliothèque logicielle
- C6.1Superviser le fonctionnement d'un produit matériel/logiciel
|
Pré requis
- Programmation C++
- Bases délectronique
|
Travail demandé
- Lire la documentation fournie
- Analyse des documents de configuration
- Faire les schémas de connexion des carte/moteurs/capteurs
- Créer lalgorithme
- Faire le programme
|
Matériel
- Voir présentation plus loin
|
Critères dévaluation
- Un rapport par groupe figurant la description du travail fourni. Une première partie décrit le travail du groupe, puis chaque étudiant décrit son propre travail. Le rapport doit être clair et doit servir de guide dutilisateur cest à dire quun utilisateur doit pouvoir à laide de ce rapport facilement utiliser lapplication développée. Les sources du code seront données en annexe.
- Un exposé oral dune durée de 15mn, décomposé en 10mn sans interruption du jury suivi de 5mn de questions. Cet exposé aura comme support le rapport précédemment décrit. Il se déroulera dans la semaine 20/21.
- Une démonstration du développement en cours de TP
- Une partie du travail se fait en groupe, une autre individuellement. Mais le principe est de réaliser la totalité de lapplication. Le travail de groupe est donc prédominant, lentraide entre étudiant est donc souhaité, voir indispensable.
- Une vidéo, mise en ligne sur Youtube, de votre démonstration finale.
- Un CD de sauvegarde de lensemble du travail (Rapport, code, manuel dutilisation
)
|
Mise en situation
Lobjectif du projet est de réaliser un robot dédié à la surveillance des grands espaces tels que les entrepôts et sites industriels en dehors des heures dactivités..
Surveillance robot
Ses principales missions sont la détection dincident (intrusion, porte ouverte, incendie
) et lalerte dun agent de sécurité en temps réel.
Il est capable de réaliser des rondes définies ou aléatoires sur un périmètre assigné.
Sil détecte une anomalie il préviendra lagent de sécurité en temps réel. Ce dernier peut alors prendre le contrôle à distance du robot et le diriger afin didentifier lincident et agir en conséquence.
Le Lycée possède 2 robots. Chaque groupe détudiants aura la charge dun robot.
Description du robot
- Environnement de travail :
Tutorial NI
- Carte MyRio de National Instruments
MyRio
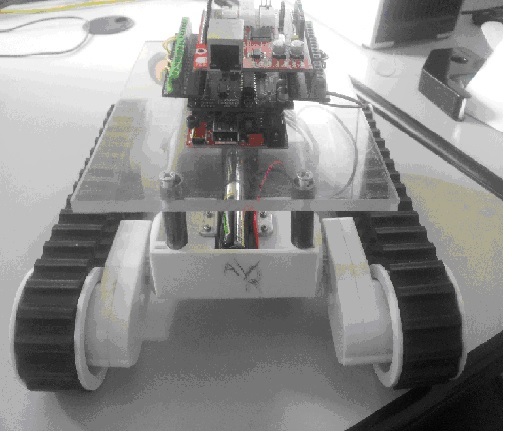
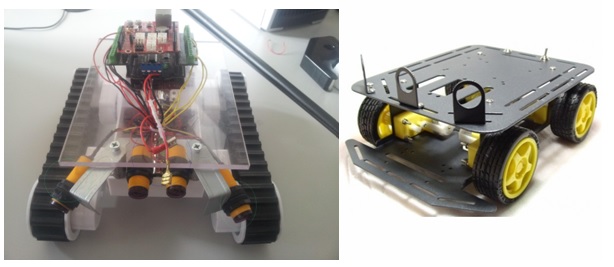
- Robot
La plateforme DFRobot 4WD est un kit incluant 4 moteurs, 4 roues et un châssis complet en aluminium haute résistance ainsi que les accessoires pour lassembler.

- Différents capteurs seront utilisés :
- Capteur dinclinaison
- Capteur IR
Fonctionnalités demandées aux robots :
 1er partie
1er partie :
A partir dun PC, le gardien doit pouvoir télécommander le robot. Il lui fait apprendre un trajet. Le robot sera alors capable de le reproduire de façon indépendante même si certains obstacles encombre le chemin (carton, chaise
).
La télécommande se fera par XBee.
2em partie :
Une fois le trajet mémorisé, les étudiants devront trouver une solution pour repérer toutes intrusions (capteur de mouvements) et avertir le gardien.
2 . Travail demandé
Il existe deux robots. Pour la prise en main, les quatre étudiants travailleront ensemble. Puis, les étudiants se sépareront en deux groupes, un robot chacun.
Groupe :
- Connecter lensemble des robots
- Faire un schéma du câblage
- Créer son environnement de travail.
- Faire marcher une roue simplement en prenant lexemple du PWM donné : TP PWM
- Récupérer linformation dun capteur de présence.
Remarque : il existe un projet et un mini-projet utilisant les cartes Fez et le XBee sur le partage. Les cahiers des charges sont différents, mais il est important de sen inspirer pour avoir le temps de finir ce mini-projet
Etudiant 1/3 : Commande moteur
- Utiliser une classe qui commande les moteurs (marche, tourner, avancer
)
- Trouver un algorithme permettant de réaliser un trajet à partir dun fichier
Etudiant 2/4 : Partie commande des capteurs et du bouton poussoir
- Réaliser une classe qui la communication entre le PC et le robot
- Faire lIHM de commande sur le PC
- Enregistrer un trajet dans un fichier
En groupe : Programme autonome du déplacement des robots
- Faire lalgorithme du programme autonome.
- Tester le déplacement autonome.

