
Mise en situation
Le Le travail de ce TP se déroule à deux.
Temps alloué : 3h
La programmation se fait sur PC en C++ sous Eclipse Kepler.
|
Objectif
C4.4 : Développer un module logiciel.
Découverte de l'environnement MyRio.
Utilisation des entrée/sortie analogiques de la carte MyRio
|
But
| Lancer une alarme si un objet est détecté à une certaine distance.
|
But du TP :
Utiliser une entrée analogique de la carte
MyRio pour récupérer une distance grâce au capteur de proximité
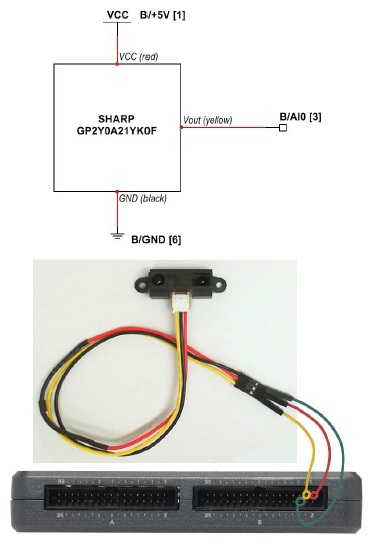
GP2Y0A21YK0F
Utilisation des sorties analogiques : préparation du projet
- Copier le répertoire BTSBASE du partage sur le disque dur local. Il sert de base à un projet C++ pour MyRio
- Copier les 4 fichiers : AIO.c, AIO.h, PortIO.cpp et PortAIO.h dans le répertoire src du projet
- Renommer le répertoire de votre projet en CapteurIR et renommer le main.cpp
- Lancer eclipse
- Choisir comme WorkSpace le répertoire c:BTSBase
- Importer votre projet (General/Existing Projects into Workspace) et faire un refresh
Première utilisation des AIO de la carte :
On va d'abord écrire sur une broches d'un port et lire sur une autre broche ce que l'on vient d'écrire puis l'afficher :
- Mettre un câble entre la sortie AO0 (broche 2) et l'entrée AI0 (broche 3) du port A
- En utilisant l'objet PortAIO, faire un programme qui incrémente un float de 0.1 toutes les secondes, qui l'écrit sur la broche 2 et qui lit sur la broche 3. Afficher le résultat du float écrit et du float lu
Programmation pour le capteur IR :
-
En vous aidant du datasheet et du brochage (Lien), connecter le capteur et la carte.
- Faire le programme qui lise la valeur sur la broche d'entrée en déplaçant un objet devant le capteur. La distance mesurable est comprise entre 10 et 80cm.
- Relever les valeurs min et max en tension pour les valeurs min et max en distance.
- Faire la conversion et afficher la distance en cm à laquelle se trouve un objet devant le capteur.
Remarque : la courbe n'est pas linéaire, il faut faire une approximation.
Pour plus de précision, regarder ici

