Le travail de ce TP se déroule seul.
Temps alloué : 7h
La programmation se fait d'abord sur Arduino Due puis directement sur la carte Raspberry avec geany (gcc)
Objectif
Prise en main du Ravoux
Programmation du multiprocessus et envoi de signaux
Une image de la simulation Isis ou tikencad, de la connexion sur Fritzing.
Un listing du code source commenté
Démonstration au professeur de la progression.
Une vidéo commentée de la démonstration
Critères dévaluation
Clarté de l algorithme, lisibilité du code, exécutable opérationnel.
But du TP
Dans une chaîne de production, le remplissage est souvent automatisé.
Exemple :
Le lycée dispose d'une partie opérative Ravoux
Nous allons utiliser une raspberry pour commander cette partie opérative.
Commande Ravoux par Arduino
Dans cette partie, nous nous occuperons que de la détection des pots (B1 et B2) et de la commande tout ou rien du moteur (T3).
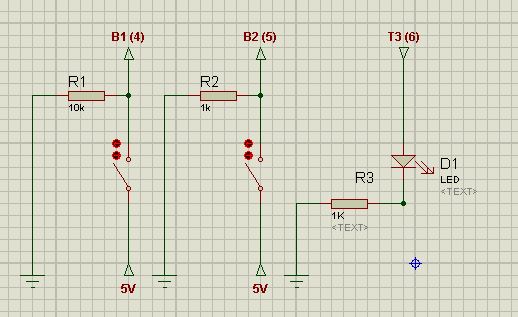
Avant dutiliser la carte du Ravoux, utiliser une carte en local et 2 boutons poussoir représentant les 2 capteurs B1 et B2. La simulation du moteur se fera avec une led
L'algorithme est le suivant :
Boucle infinie
Démarre moteur
Tant que pot pas présent en B1
Lire état de B1
Afficher « pot présent en B1 »
Tant que pot pas présent sous la trémie
Lire état de B2
Afficher « pot présent en B2 »
Stopper moteur pendant 5s
Réaliser le schéma de câblage de l'arduino sur Fritzing
Faire une démonstration de votre application sur le Ravoux
Remarque :
Les capteurs B1 et B2 sont branchés respectivement sur les broches 4 et 5, la commande moteur sur la broche 6
Il faut alimenter la partie opérative (câble 0) par du 5V (alimentation externe). Penser à la masse commune (Prise sur le kit).
Dans un premier temps, on alimente en 5V le moteur M1(Câble 19) et le commun à la masse (câble 20). De même, on alimente en 5V la commande T3 de marche/Arrêt du moteur (le moteur du tapis tournera régulièrement).
Commande Ravoux par Raspberry
Utilisation de la biblithèque WiringPi pour utiliser la GPIO façon Arduino Bibliothèque wiring en français Bibliothèque Wiring originale
Pour compiler sous geany, allez dans le menu construire/Définir les commandes de constructions. Dans l'onglet Construire, sous le label Build, écrire la ligne gcc -Wall -o "%e" "%f" -lwiringPi
Le programme comportera deux processus :
Le processus père, créera le fils et attendra une entrée clavier pour « tuer » le fils_capteur.
Le fils_capteur sera à lécoute du GPIO de la carte et détectera la présence par les 2 capteurs B1 et B2. Il affichera à lécran le changement détat du capteur. L'algorithme est le même que précédemment
On commandera le moteur via T3. Quand le pot arrive sur B2, on coupera le moteur M1 pendant 5s avant de le redémarrer. Pour cela, on rebranchera le câble 16 sur le bornier en laissant le moteur sur l'alimentation extérieure. La commande se fera par la broche 3 du GPIO