TP8 : Plaque de découpe KissCut (CCF)

Mise en situation
Le travail de ce TP se déroule à 2.
Temps alloué : 7h
Prise en main et dépannage d'un d'un système de reconnaissance de formes
|
Objectif
- Prise en main des logiciels
- Dépannage composants
|
Pré requis
Programmation C (1er année) sur arduino
Notion de réseau
Programmation Visual C#
Arduino
|
Travail demandé
A chaque test réalisé, faire une démonstration au professeur
Démonstration au professeur de la progression.
|
Critères dévaluation
| Exécutable opérationnel.
|
Mettre en oeuvre la commande manuelle à distance du positionnement de la caméra au centre d'une croix. Tester tous les éléments un à un.
L'entreprise KissCut a donné en projet BTS SN la charge d'automatiser la reconnaissance de formes pour positionner une plaque de découpe à usiner sur CN
Projet BTS
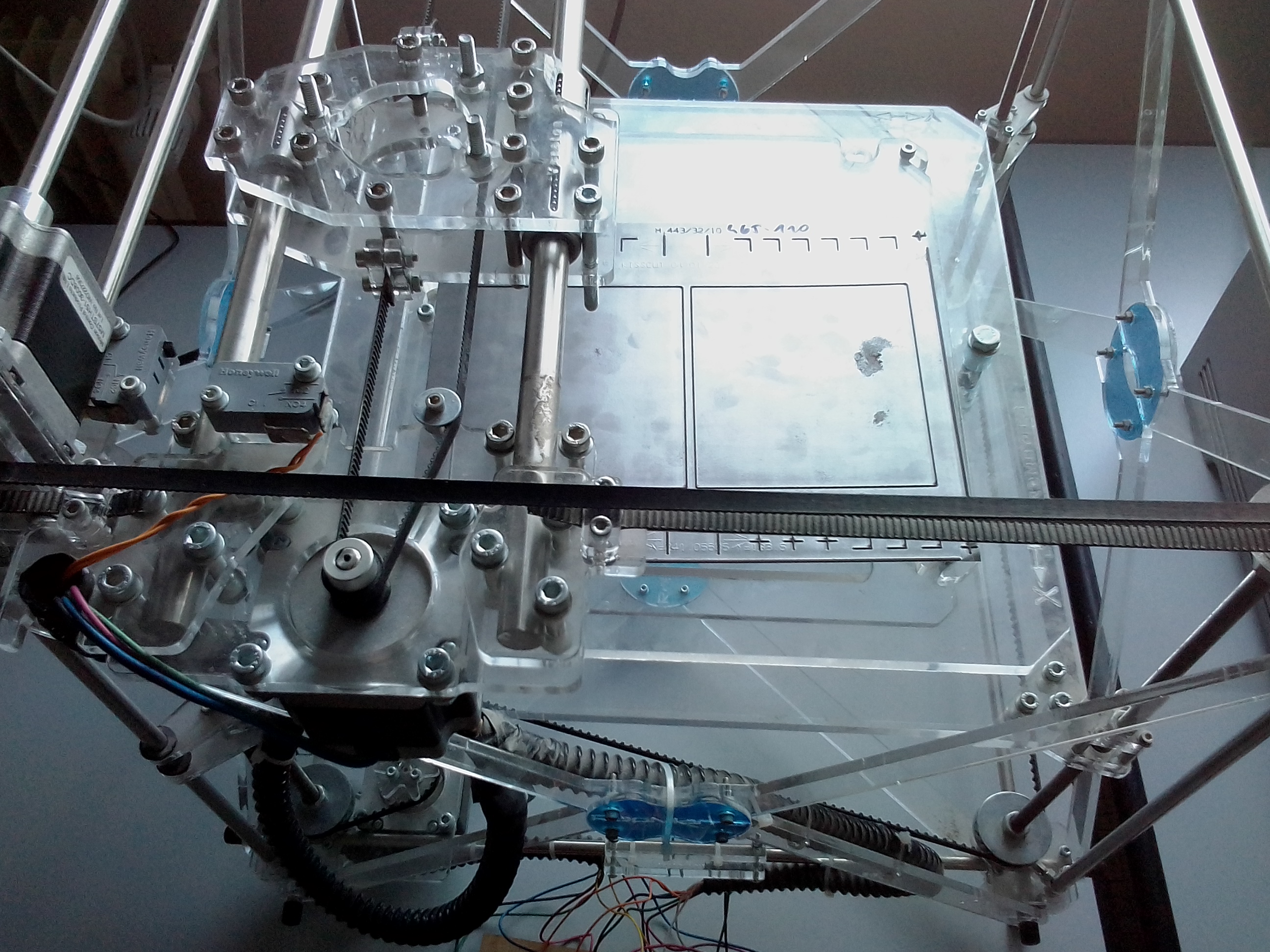
Comme la CN n'est en production et ne peut être arrêtée, nous allons la simuler avec une ancienne imprimante 3D commandée par une arduino et communicant par BT avec le PC de commande.

Pour pouvoir positionner l'axa de la fraise en fonction de la plaque à usiner, il faut déplacer le curseur d'une caméra au centre d'une croix. Nous allons utiliser une caméra haute définition professionnelle Baumer

La caméra est une
caméra réseau. Vous devrez :
- Trouver l'adresse IP de la caméra (VeriSense)
- Installer le logiciel qui permet la visualisation du flux d'image (Baumer GAP SDK Download )
| Arduino et test composants |
La table possède trois moteurs pas à pas qui sont commandés par une arduino Due. La puissance est assurée par une alimentation stabilisée. L'interfaçage est assuré par trois "double" pont H. Des fin de course assurent la sécurité. La transmission avec la supervision se fait par BT (HC-05).
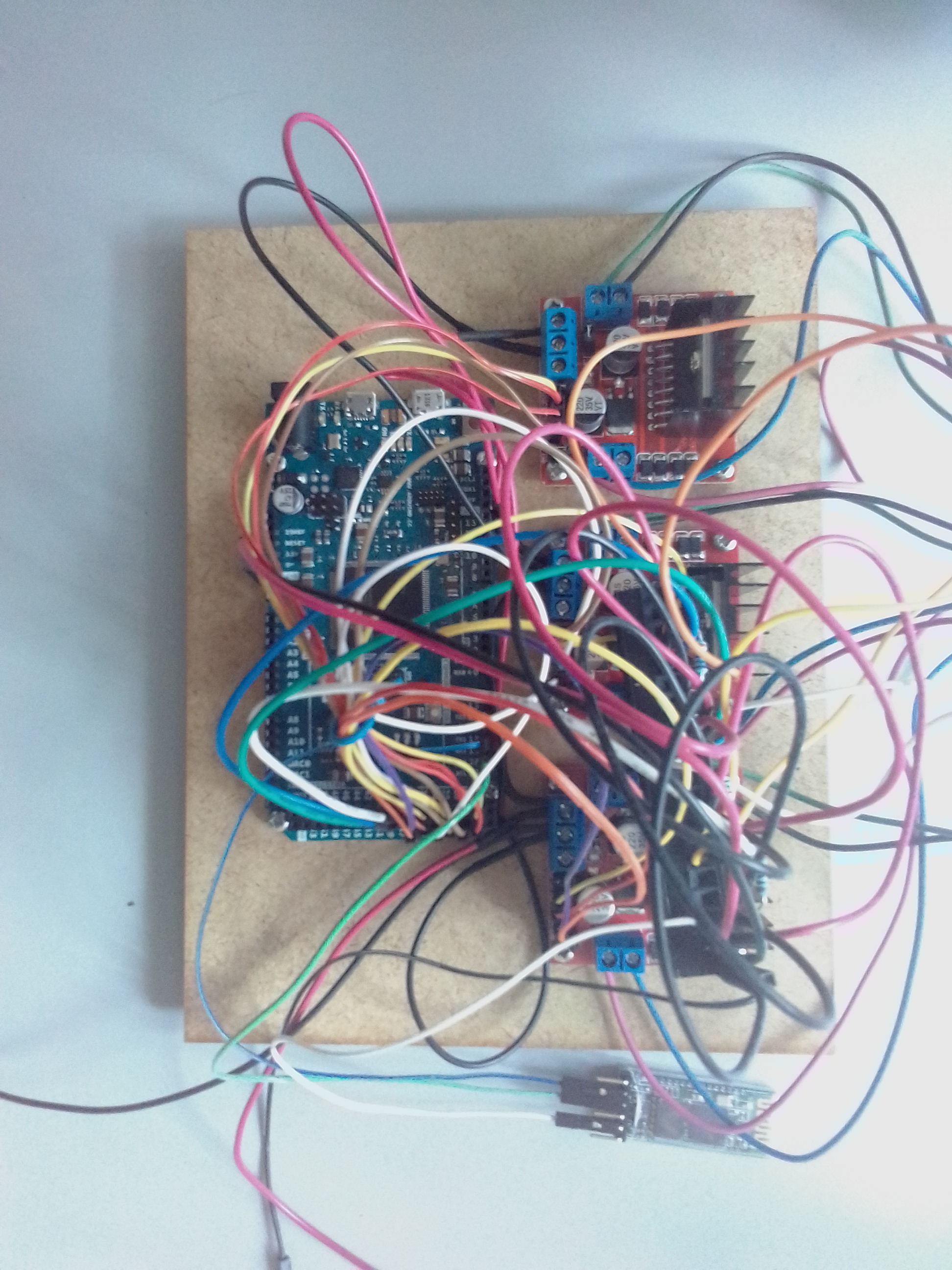
Pour pouvoir tester le matériel de façon unitaire, il vous est demandé de réaliser les points suivants :
- Avec fritzing (ou autre logiciel), réaliser le schéma de cablage
- A l'aide du code /2019KissCutDP/Arduino/KissCutArduinoDP-Final, réaliser sur StarUML (ou autre) le diagramme de classe
- Faire le programme test qui déplace les moteurs pas à pas un à un dans les deux sens.
- Faire le programme qui test les capteurs de fin de course un à un
- Faire le programme qui permet la communication BT avec un téléphone pour tester le HC-05. Ce programme allumera ou éteindra une led
Exemple
| Application PC, communication BT et test de l'application finale |
Pour commander la table manuellement à distance, nous utilisons une application développée en Visual C#. La communication se faisant en BT, nous utilisons une clé sur le PC.
- Installer la clé et tester la communication
- Vérifier le format de la trame
- Lancer l'application et rajouter un champ qui gère le moteur en Z

